En la segunda hora en equipos teníamos que tratar de demostrar matemáticamente como podemos hacer figuras con doce palillos que den exactamente.
lunes, 21 de marzo de 2011
Resumen de la clase 17/03/2011
En esta clase a la primera hora, el profesor nos pidió la autoevaluacion en los tres aspectos,cognitivo,procedimental y actitudinal,ademas le pregunto a unas cuantas niñas sobre los talleres y guías desarrollados,como tarea debemos estudiar Domotica.
Resumen de la clase 10/03/2011
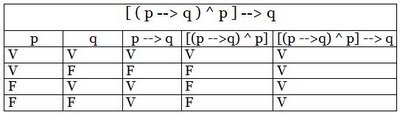
En esta clase,el profesor nos hablo sobre la influencia de los griegos en el conocimiento,ya que fueron los primeros en dejar legados escritos,hablamos de el origen de los circuitos las tablas de verdad, proposiciones condicionales e incondicionales,las tautologias.

miércoles, 9 de marzo de 2011




Resumen de la clase 3/03/2011
En la primera hora el profesor nos realizo preguntas sobre la robotica,la inteligencia artificial,la cibernética,entre otras,nos pregunto la diferencia entre inteligencia artificial y cibernética,que es la robotica,las leyes de la robotica y luego nos dejo un cuestionario d e25 preguntas ya que no supimos contestarlas para que aprendiéramos mas sobre el tema.
En la segunda hora nos pregunto en el nivel de lectura que íbamos,nos sugirió mejorarlo,y avanzar para llegar la sexta lectura,que es muy importante.
miércoles, 2 de marzo de 2011
Preguntas : Guía seis
¿QUE ES LA GEOESTADISTICA?
La geoestadistica puede considerarse como una disciplina que se ocupa del análisisestadístico de variables espacialmente distribuidas;en el ámbito de la geografía de una región o país.Es la aplicación de la teoría de funciones aleatorias al análisis, modernización y estimación de fenómenos estructurados en el espacio y en el tiempo.Estas técnicas se pueden aplicar directamente al análisis de imágenes de todo tipo.
¿QUE ES LA PERCEPCIÓN AUTOMÁTICA?
El centro de morfología matemática ,estudia la técnica basada en la morfología matemática.Permite el análisis de imágenes mediante la identificación y movilización de los objetos que la componen y la detección de algunas de sus propiedades estructurales
.
UTILIZACIÓN DE LA TELESALUD:
De acuerdo con los médicos y los gestores, telesalud beneficios incluyen un mejor acceso a servicios especializados en regiones remotas, la mejora de la continuidad de la atención, y la mayor disponibilidad de información. Telesalud también mejora los médicos la práctica de facilitar la formación médica continuada, los contactos con sus compañeros, y el acceso a una segunda opinión. En el hospital y región los niveles de salud, telesalud tiene el potencial para apoyar el desarrollo de centros regionales de referencia, favor de la retención de conocimientos especializados a nivel local, y ahorrar costes. Condiciones para la aplicación con éxito de redes de telesalud incluyen la participación de médicos en la toma de decisiones, la disponibilidad de dedicación de recursos humanos y materiales, y una planificada estrategia de difusión. Entrevistas con los médicos y los gestores también destacó la importancia de considerar la telesalud en el marco más amplio organización de los servicios de salud en las regiones remotas y rurales.
AVERIGUA Y EXPLICA LAS LEYES DE LA ROBOTICA
- Un robot no debe causar daño a un ser humano o por inacción,permitir que un ser humano sea dañado. Explicación:Los robots fueron inventados para nuestro beneficio por este motivo no pueden hacernos daño porque no serian de nuestra utilidad y no serviría su invención.
- Un robot debe obedecer las ordenes de todo ser humano siempre que estas ordenes no impliquen una violación a la primera ley. Explicación:Los robots fueron creados para obedecer las ordenes de los humanos pero estas ordenes no pueden violar los derechos e integridad física de los humanos.
- Un robot debe preservar su propia existencia siempre y cuando este contradiga la primera y segunda ley. Explicación:Los robots deben existir para ayudarnos en nuestros problemas diarios.
APLICACIONES DE LA ROBOTICA EN INDUSTRIA,LABORATORIOS,AGRICULTURA, EL ESPACIO,EN EDUCACIÓN:
INDUSTRIA:
- La soldadura de punto y soldadura de arco.
- Pinturas de spray
- Transportación de materiales
- Molienda de materiales
- Moldeado en la industria plástica
- Maquinas-herramientas
- Aplicación de transferencia de material
- Carga y descarga de maquinas
- Operaciones de procesamiento
LABORATORIO:
- Carga y descarga de maquinas
- Colocación de tubos de pruebas dentro de los instrumentos de medición
- Procedimientos manuales automatizados
- Un típico sistema de preparación de muestras consiste de un robot y una estación de laboratorio,la cual contiene balanzas,dispensarios centrifugados,racks de tubos de pruebas,etc.
AGRICULTURA:
Para muchos la idea de tener un robot agricultor es ciencia ficción,pero la realidad es muy diferente;o al menos así parece ser para el instituto de investigación australiano,el cual ha invertido,una gran cantidad de dinero y tiempo en el desarrollo de este tipo de robots.Entre sus proyectos se encuentra una maquina que esquila a las ovejas.La trayectoria del cortador
sobre el cuerpo de las ovejas se planea con un modelo geométrico de la oveja.
ESPACIO:
Muchos científicos han hecho la sugerencia de que es necesario el uso de robots para continuar con los avances en la exploración espacial;pero como todavía no se llega a un grado de automatización tan precisa para esta aplicación, el ser humano aun no ha podido ser reemplazado por estos.
Algunas de las investigaciones están encaminadas al diseño, construcción y control de vehículos autónomos,los cuales llevaran a bordo complejos laboratorios y cámaras muy sofisticadas para la exploración de otros planetas.
EDUCACIÓN:
Los programas educacionales utilizan la simulación de control de robots como un medio de enseñanza.El uso del robot tortuga en conjunción con el lenguaje para enseñar ciencias computacionales y fue creado con el fin de proporcionar a los estudiantes un medio natural y divertido para el aprendizaje de las matemáticas.
Guía Seis:SIGNIFICADO DE LAS PALABRAS
ROBOT:Un robot, es un agente artificial mecánico o virtual. Es una máquina usada para realizar un trabajo automáticamente y que es controlada por una computadora. En la práctica, esto es por lo general un sistema electromecánico que, por su apariencia o sus movimientos, ofrece la sensación de tener un propósito propio. La palabra robot puede referirse tanto a mecanismos físicos como a sistemas virtuales de software, aunque suele aludirse a los segundos con el término de bots. Sinónimo:Maquina artificial,maquina virtual.
SISTEMAS GUIADOS:En el cual el usuario conduce el robot a través de los movimientos a ser realizados.
SISTEMAS DE PROGRAMACIÓN DE NIVEL-ROBOT:En los cuales el usuario escribe un programa de computadora al especificar el movimiento y el sensado.
SISTEMAS DE PROGRAMACIÓN DE NIVEL-TAREA:En el cual el usuario especifica la operación por sus acciones sobre los objetos que el robot manipula.
TERAFIM: Hombres artificiales que pueden ser fabricados en serie.
VEHÍCULO AUTÓNOMO:Es cualquier vehículo no tripulado con cierto nivel de autonomía integrada.
LENGUAJE DE PROGRAMACIÓN PARA ROBOTS:
AL
HELP
MAPLE
PAL
MCL
MAL EXTENDIDO
RAPT
AUTOPASS
LAMA
Creación de la función de trabajo. Operación inteligente.
Generación de la función de manipulación.
Interpretación y desarrollo, de una forma interactiva, de una estrategia de realimentación para la adaptación al entorno de trabajo.
STRIPS
HILAIRE
Cada lenguaje se ha diseñado tomando como base un robot en específico del mercado, lo que anula su universalidad y la posibilidad de emplearlo en modelos diferentes.
Los lenguajes, en muchos casos, se dirigen hacia aplicaciones diferentes, lo que limita grandemente su utilización para la programación de otras tareas.
Con excepción de HELP, todos los lenguajes de este grupo están provistos de estructuras de datos del tipo complejo. Así, el AL utiliza vectores, posiciones y transformaciones; el PAL usa, fundamentalmente, transformaciones y el MAPLE permite la definición de puntos, líneas, planos y posiciones. Sólo el PAL, y el HELP carecen de capacidad de adaptación sensorial. Los lenguajes AL, MAPLE y MCL, tienen comandos para el control de la sensibilidad del tacto de los dedos (fuerza, movimiento, proximidad, etc.). Además, el MCL posee comandos de visión para identificar e inspeccionar objetos.
A continuación, se exponen las características más representativas de los lenguajes dedicados a la programación estructurada.
AL
Trata de proporcionar definiciones acerca de los movimientos relacionados con los elementos sobre los que el brazo trabaja. Fue diseñado por el laboratorio de Inteligencia Artificial de la Universidad de Stanford, con estructuras de bloques y de control similares al ALGOL, lenguaje en el que se escribió. Está dedicado al manipulador de Stanford, utilizando como procesadores centrales, a un PDP 11/45 y un PDP KL-10.
HELP
Creado por GENERAL ELECTRIC para su robot ALLEGRO y escrito en PASCAL/FORTRAN, permite el movimiento simultáneo de varios brazos. Dispone, asimismo, de un conjunto especial de subrutinas para la ejecución de cualquier tarea. Utilizando como CPU, a un PDP 11.
MAPLE
Escrito, como intérprete, en lenguaje PL-1, por IBM para el robot de la misma empresa, tiene capacidad para soportar informaciones de sensores externos. Utiliza, como CPU a un IBM 370/145 SYSTEM 7.
PAL
Desarrollado por la Universidad de Purdure para el manipulador de Stanford, es un intérprete escrito en FORTRAN y Ensamblador, capaz de aceptar sensores de fuerza y de visión. Cada una de sus instrucciones, para mover el brazo del robot en coordenadas cartesianas, es procesada para que satisfaga la ecuación del procesamiento. Como CPU, usan un PDP 11/70.
MCL
Lo creó la compañía MC DONALL DOUGLAS, como ampliación de su lenguaje de control numérico APT. Es un lenguaje compilable que se puede considerar apto para la programación de robots "off-line".
MAL EXTENDIDO
Procede del Politécnico de Milán, al igual que el MAL, al que incorpora elementos de programación estructurada que lo potencian notablemente. Se aplica, también, al robot SIGMA.
ESPECIFICATIVA A NIVEL OBJETO.
En este grupo se encuentran tres lenguajes interesantes:
RAPT
Su filosofía se basa en definir una serie de planos, cilindros y esferas, que dan lugar a otros cuerpos derivados. Para modelar a un cuerpo, se confecciona una biblioteca con sus rasgos más representativos. Seguidamente, se define los movimientos que ligan a los cuerpos a ensamblar (alinear planos, encajar cilindros, etc.).
Así, si se desea definir un cuerpo C1, se comienza definiendo sus puntos más importantes, por ejemplo:
P1 = <>
P2 = <>
P3 = <>
P4 = <>
Si, en el cuerpo, existen círculos de interés, se especifican seguidamente:
C1 = CIRCLE/P2, R;
C2 = CIRCLE/P4, R;
A continuación, se determinan sus aristas:
L1 = L/P1, P2;
L2 = L/P3, P4;
Si, análogamente al cuerpo C1, se define otro, como el C2, una acción entre ambos podría consistir en colocar la cara inferior de C1 alineada con la superior de C2. Esto se escribiría.
AGAINST / BOT / OF C1, TOP / OF C2;
El lenguaje RAPT fue creado en la Universidad de Edimburgo, departamento de Inteligencia Artificial; está orientado, en especial, al ensamblaje de piezas. Destinado al robot FREDY, utiliza, como procesador central, a un PDP 10. Es un intérprete y está escrito en lenguaje APT.
AUTOPASS
Creado por IBM para el ensamblaje de piezas; utiliza instrucciones, muy comunes, en el idioma inglés. Precisa de un ordenador de varios Megabytes de capacidad de memoria y, además de indicar, como el RAPT, puntos específicos, prevé, también, colisiones y genera acciones a partir de las situaciones reales.
Un pequeño ejemplo, que puede proporcionar una idea de la facilidad de relacionar objetos, es el programa siguiente, que coloca la parte inferior del cuerpo C1 alineada con la parte superior del cuerpo C2. Asimismo, alinea los orificios A1 y A2 de C1, con los correspondientes de C2.
PLACE C1
SUCH THAT C1 BOT CONTACTS C2TOP
AND B1 A1 IS ALIGNED WITH C2A1
AND B1 A2 IS ALIGNED WITH C2A2
El AUTOPASS realiza todos sus cálculos sobre una base de datos, que define a los objetos como poliedros de un máximo de 20,000 caras. Está escrito en PL/1 y es intérprete y compilable.
LAMA
Procede del laboratorio de Inteligencia Artificial del MIT, para el robot SILVER, orientándose hacia el ajuste de conjuntos mecánicos. Aporta más inteligencia que el AUTOPASS y permite una buena adaptación al entorno. La operatividad del LAMA se basa en tres funciones principales:
EN FUNCIÓN DE LOS OBJETIVOS.
La filosofía de estos lenguajes consiste en definir la situación final del producto a fabricar, a partir de la cual se generan los planes de acción tendentes a conseguirla, obteniéndose, finalmente, el programa de trabajo. Estos lenguajes, de tipo natural, suponiendo una potenciación extraordinaria de la Inteligencia Artificial, para descargar al usuario de las labores de programación. Prevén, incluso, la comunicación hombre-máquina a través de la voz.
Los lenguajes más conocidos de este grupo son:
STRIPS
Fue diseñado, en la Universidad de Stanford, para el robot móvil SHAKEY. Se basa en un modelo del universo ligado a un conjunto de planteamientos aritmético-lógicos que se encargan de obtener las subrutinas que conforman el programa final. Es intérprete y compilable, utilizando, como procesadores, a un PDP-10 y un PDP-15.
HILAIRE
Procedente del laboratorio de Automática Y Análisis de Sistemas (LAAS) de Toulouse, está escrito en lenguaje LISP. Es uno de los lenguajes naturales más interesantes, por sus posibilidades de ampliación e investigación.
Conclusiones
Es mucho lo que se ha hecho en el área de la programación para la robótica; sin embargo aún no existe un lenguaje ideal para la programación de los robots. Son muchos los lenguajes creados hasta ahora, en parte las causas principales de esta amplia gama de lenguajes inadecuados o poco efectivos son:
Hoy en el mundo existe un interés general para lograr un sistema de percepción del entorno cada vez más avanzado. Para esto se hace necesaria la ampliación de la Inteligencia Artificial, que interviene en la valoración del espacio exterior o entorno y determina los planes de acción alternativos o lo que es lo mismo la respuesta a la interacción con ese medio.
ALGORITMO GENÉTICO:Es una serie de pasos organizados que describe el proceso que se debe seguir, para dar solución a un problema específico. En los años 1970, de la mano de John Henry Holland, surgió una de las líneas más prometedoras de la inteligencia artificial, la de los algoritmos genéticos. Son llamados así porque se inspiran en la evolución biológica y su base genético-molecular. Estos algoritmos hacen evolucionar una población de individuos sometiéndola a acciones aleatorias semejantes a las que actúan en la evolución biológica,(mutaciones y recombinaciones genéticas), así como también a una selección de acuerdo con algún criterio, en función del cual se decide cuáles son los individuos más adaptados, que sobreviven, y cuáles los menos aptos, que son descartados. También es denominado algoritmos evolutivos, e incluye las estrategias evolutivas, la programación evolutiva y la programación genética.
Suscribirse a:
Comentarios (Atom)