La esclavitud es el dominio hacia otra persona y en la actualidad se puede apreciar la existencia permanente de esta,aunque se diga que esta ha acabado,podemos comprobar que aun somo esclavos de nosotros mismos,debido a que vivimos en un mundo muy consumista,un pais violento que tiene grupos subversivos que privan de la libertad a muchas personas,el mal uso de la tecnologia,es decir,la adiccion a varios aparatos electronicos,que hace que seamos personas ociosas,dependientes de esta,asi como en la antiguedad,los esclavos dependian de su amo,la falta de educacion de calidad,hace que quedemos inmersos en la analfabetizacion y el retroceso,factores que han impedido el desarrollo del pais.
Pienso que a mi ensayo le falto mas conectores y mas voces que apoyaran mis argumentos.
jueves, 10 de noviembre de 2011
Reflexion del ensayo
ENSAYO
Catalina Cortés Tabares 11-1.
Ensayo: Capítulo 21-Camino hacia la libertad, Carl Sagan.
The illiteracy goes back to slavery, but now we can say that this problem continues to advance because of ourselves, as people are increasingly consumerist and mediocre, leaving aside the issues that actually affect us such as: malnutrition, inequality, repression, lack of commitment in choosing our representatives, factors that lead to a progressive growth of illiteracy which can lead us to an eternal slavery or search for a quality education.
La analfabetización: ¿Causada por la esclavitud o la negligencia?
La analfabetización surge como consecuencia de la falta de educación de calidad en el mundo y se remonta a la época de la esclavitud, sin embargo tenemos que preguntarnos: ¿Hasta qué punto hemos permitido que este grave problema crezca cada día en nuestra sociedad? ¿No será más bien que nos estamos volviendo esclavos de nosotros mismos gracias a la negligencia?
Si bien, la esclavitud fue un impedimento para el desarrollo y la alfabetización de las personas, ya que sólo las personas cultas o de clases superiores tenían acceso a la educación, estos autócratas y tiranos, rechazaban y negaban la educación a las personas porque pensaban que podrían ser superiores a ellos, por lo que eran juzgadas como subversivas, no sabiendo que “nadie es, sí se prohíbe que sea”(Paulo Freire), por esta razón las personas esclavas que deseaban aprender, lo debían hacer a escondidas; pero muy pocas personas se aventuraban o tenían la valentía de salir de la esclavitud, muy pocas personas son las que luchan para conseguir la libertad, un claro ejemplo fue Frederick Douglas un esclavo afroamericano que desde muy pequeño había sido sometido a este atroz acontecimiento, sin embargo fue alguien que tuvo muchas ganas de salir adelante y no se dejó vencer por ese dominio, quiso aprender por sus propios medios para ser alguien en la vida, fue una persona que luchó por los derechos de las personas.
A lo largo de la historia vemos que la búsqueda de alfabetización no ha sido algo muy relevante, debido a que estamos encasillados en una educación básica, los autócratas al juzgarnos como ignorantes, hacen que en nuestra ingenuidad nos creamos el cuento, provocando más analfabetizacion y encerrándonos en una educación que sólo busca homogenizar las personas, es decir, que sus opiniones no sean tomadas en cuenta que todas tengan acceso solamente a conocimientos previos ,no dan el derecho a pensar ,a desarrollar la creatividad, a hacerse preguntas, investigar, entre muchos otros factores que serían útiles para la verdadera alfabetización, como dice Paul Freire “alfabetizarse no es aprender a repetir palabras, sino a decir su palabra”, ya que el principal logro de la alfabetización es la innovación, la capacidad de tener tus propios argumentos, la capacidad de saber leer, en todo el sentido de la palabra, es decir, no sólo descifrar símbolos, letras, signos de puntuación, sino saber comprender, interpretar y proponer lo que estamos leyendo.
De ninguna manera podemos echar la culpa únicamente a los dirigentes, porque si bien ellos hacen que gran parte de la analfabetizacion se encuentre todavía en la actualidad ,ya que el derecho a una educación de calidad es imprescindible, pero debemos pensar que la culpa es de todos los seres humanos, ya no hay distinción de razas porque tanto como blancos y negros, hemos sido los culpables de que la analfabetización siga creciendo, ya que la naturaleza misma nos da recursos para aprender por nuestros propios medios; como dice Jean Piaget “el conocimiento es una construcción que realiza el individuo a través de su actividad con el medio”.
Un estudio realizado por la UNESCO dice que en pleno siglo XXI existen 770 millones de personas analfabetas, por esta razón somos responsables de este dilema por muchas razones:
1-El consumismo, que hace que adquiramos productos innecesarios, por el solo hecho de aparentar y competir con los demás, no sabiendo que hay gente que se muere del hambre en todo el mundo, y es algo que se puede evitar, pero que lastimosamente no se practica; la desnutrición afecta a más de 1000 millones de niños y niñas en el mundo (UNESCO), la desnutrición provoca que los niños sufran problemas para el aprendizaje, lo cual conlleva a la existencia de más analfabetismo en el mundo.
2-Los aparatos electrónicos que adquirimos son instrumentos esclavistas que interrumpen el desarrollo de la alfabetización, ya que crean en nosotros una adicción muy grande, lo que puede llevarnos al ocio, porque generalmente se hace mal uso de estos, cambiando así los libros que son poderosas herramientas para instruirmos,por objetos que son más bien inoficiosos.
3-Cuando elegimos gobernantes que nos esclavizan a la mediocridad, lo que conlleva al nulo desarrollo educativo, que causa desigualdad, debido a que la educación es sinónimo de libertad y si no se accede a esta por cualquier medio, sea por cuenta propia o en un plantel educativo, siempre estaremos ligados al mandato y al poderío de las mismas personas y el país se verá atrasado en los aspectos económico, político, social y cultural.
Es por eso que se debe tomar consciencia de lo que estamos haciendo porque cada vez nos estamos descuidando de algo tan importante como es el tópico de la educación, debemos pensar que nosotros mismos nos estamos sometiendo a una esclavitud que podríamos evitar si seguimos ciertos métodos, como:
1-Ahorrar dinero y recursos para mejorar la educación.
2- Ser creativos, auténticos, saber interpretar lo que leemos, saber elegir nuestros dirigentes, pensar en nuestro futuro, ya que la alfabetización te da oportunidades en la vida.
3- Tener autoestima alto, no dejarse vencer por alguna crítica de alguien que quiere verte derrumbado o tenga temor de que te desenvuelvas mejor que él en algún rol.
En última instancia es decisión de todos que dirección elegir, quedarnos en la esclavitud de la analfabetización y que el camino de la alfabetización sea sólo una utopía o llevar la verdadera educación a la realidad.
24/03/2011 WEB 2.0
La Web 2.0 es la transición que se ha dado de aplicaciones tradicionales hacia aplicaciones que funcionan a través del web enfocadas al usuario final. Se trata de aplicaciones que generen colaboración y de servicios que reemplacen las aplicaciones de escritorio.
Es una etapa que ha definido nuevos proyectos en Internet y está preocupándose por brindar mejores soluciones para el usuario final. Muchos aseguran que hemos reinventado lo que era el Internet, otros hablan de burbujas e inversiones, pero la realidad es que la evolución natural del medio realmente ha propuesto cosas más interesantes como lo analizamos diariamente en las notas de actualidad.
martes, 12 de abril de 2011

lunes, 21 de marzo de 2011
Resumen de la clase 17/03/2011
Resumen de la clase 10/03/2011
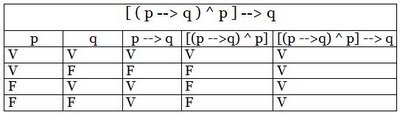
En esta clase,el profesor nos hablo sobre la influencia de los griegos en el conocimiento,ya que fueron los primeros en dejar legados escritos,hablamos de el origen de los circuitos las tablas de verdad, proposiciones condicionales e incondicionales,las tautologias.

miércoles, 9 de marzo de 2011




Resumen de la clase 3/03/2011
miércoles, 2 de marzo de 2011
Preguntas : Guía seis
- Un robot no debe causar daño a un ser humano o por inacción,permitir que un ser humano sea dañado. Explicación:Los robots fueron inventados para nuestro beneficio por este motivo no pueden hacernos daño porque no serian de nuestra utilidad y no serviría su invención.
- Un robot debe obedecer las ordenes de todo ser humano siempre que estas ordenes no impliquen una violación a la primera ley. Explicación:Los robots fueron creados para obedecer las ordenes de los humanos pero estas ordenes no pueden violar los derechos e integridad física de los humanos.
- Un robot debe preservar su propia existencia siempre y cuando este contradiga la primera y segunda ley. Explicación:Los robots deben existir para ayudarnos en nuestros problemas diarios.
- La soldadura de punto y soldadura de arco.
- Pinturas de spray
- Transportación de materiales
- Molienda de materiales
- Moldeado en la industria plástica
- Maquinas-herramientas
- Aplicación de transferencia de material
- Carga y descarga de maquinas
- Operaciones de procesamiento
- Carga y descarga de maquinas
- Colocación de tubos de pruebas dentro de los instrumentos de medición
- Procedimientos manuales automatizados
- Un típico sistema de preparación de muestras consiste de un robot y una estación de laboratorio,la cual contiene balanzas,dispensarios centrifugados,racks de tubos de pruebas,etc.
Guía Seis:SIGNIFICADO DE LAS PALABRAS
AL
HELP
MAPLE
PAL
MCL
MAL EXTENDIDO
RAPT
AUTOPASS
LAMA
Creación de la función de trabajo. Operación inteligente.
Generación de la función de manipulación.
Interpretación y desarrollo, de una forma interactiva, de una estrategia de realimentación para la adaptación al entorno de trabajo.
STRIPS
HILAIRE
Cada lenguaje se ha diseñado tomando como base un robot en específico del mercado, lo que anula su universalidad y la posibilidad de emplearlo en modelos diferentes.
Los lenguajes, en muchos casos, se dirigen hacia aplicaciones diferentes, lo que limita grandemente su utilización para la programación de otras tareas.
Con excepción de HELP, todos los lenguajes de este grupo están provistos de estructuras de datos del tipo complejo. Así, el AL utiliza vectores, posiciones y transformaciones; el PAL usa, fundamentalmente, transformaciones y el MAPLE permite la definición de puntos, líneas, planos y posiciones. Sólo el PAL, y el HELP carecen de capacidad de adaptación sensorial. Los lenguajes AL, MAPLE y MCL, tienen comandos para el control de la sensibilidad del tacto de los dedos (fuerza, movimiento, proximidad, etc.). Además, el MCL posee comandos de visión para identificar e inspeccionar objetos.
A continuación, se exponen las características más representativas de los lenguajes dedicados a la programación estructurada.
AL
Trata de proporcionar definiciones acerca de los movimientos relacionados con los elementos sobre los que el brazo trabaja. Fue diseñado por el laboratorio de Inteligencia Artificial de la Universidad de Stanford, con estructuras de bloques y de control similares al ALGOL, lenguaje en el que se escribió. Está dedicado al manipulador de Stanford, utilizando como procesadores centrales, a un PDP 11/45 y un PDP KL-10.
HELP
Creado por GENERAL ELECTRIC para su robot ALLEGRO y escrito en PASCAL/FORTRAN, permite el movimiento simultáneo de varios brazos. Dispone, asimismo, de un conjunto especial de subrutinas para la ejecución de cualquier tarea. Utilizando como CPU, a un PDP 11.
MAPLE
Escrito, como intérprete, en lenguaje PL-1, por IBM para el robot de la misma empresa, tiene capacidad para soportar informaciones de sensores externos. Utiliza, como CPU a un IBM 370/145 SYSTEM 7.
PAL
Desarrollado por la Universidad de Purdure para el manipulador de Stanford, es un intérprete escrito en FORTRAN y Ensamblador, capaz de aceptar sensores de fuerza y de visión. Cada una de sus instrucciones, para mover el brazo del robot en coordenadas cartesianas, es procesada para que satisfaga la ecuación del procesamiento. Como CPU, usan un PDP 11/70.
MCL
Lo creó la compañía MC DONALL DOUGLAS, como ampliación de su lenguaje de control numérico APT. Es un lenguaje compilable que se puede considerar apto para la programación de robots "off-line".
MAL EXTENDIDO
Procede del Politécnico de Milán, al igual que el MAL, al que incorpora elementos de programación estructurada que lo potencian notablemente. Se aplica, también, al robot SIGMA.
ESPECIFICATIVA A NIVEL OBJETO.
En este grupo se encuentran tres lenguajes interesantes:
RAPT
Su filosofía se basa en definir una serie de planos, cilindros y esferas, que dan lugar a otros cuerpos derivados. Para modelar a un cuerpo, se confecciona una biblioteca con sus rasgos más representativos. Seguidamente, se define los movimientos que ligan a los cuerpos a ensamblar (alinear planos, encajar cilindros, etc.).
Así, si se desea definir un cuerpo C1, se comienza definiendo sus puntos más importantes, por ejemplo:
P1 = <>
P2 = <>
P3 = <>
P4 = <>
Si, en el cuerpo, existen círculos de interés, se especifican seguidamente:
C1 = CIRCLE/P2, R;
C2 = CIRCLE/P4, R;
A continuación, se determinan sus aristas:
L1 = L/P1, P2;
L2 = L/P3, P4;
Si, análogamente al cuerpo C1, se define otro, como el C2, una acción entre ambos podría consistir en colocar la cara inferior de C1 alineada con la superior de C2. Esto se escribiría.
AGAINST / BOT / OF C1, TOP / OF C2;
El lenguaje RAPT fue creado en la Universidad de Edimburgo, departamento de Inteligencia Artificial; está orientado, en especial, al ensamblaje de piezas. Destinado al robot FREDY, utiliza, como procesador central, a un PDP 10. Es un intérprete y está escrito en lenguaje APT.
AUTOPASS
Creado por IBM para el ensamblaje de piezas; utiliza instrucciones, muy comunes, en el idioma inglés. Precisa de un ordenador de varios Megabytes de capacidad de memoria y, además de indicar, como el RAPT, puntos específicos, prevé, también, colisiones y genera acciones a partir de las situaciones reales.
Un pequeño ejemplo, que puede proporcionar una idea de la facilidad de relacionar objetos, es el programa siguiente, que coloca la parte inferior del cuerpo C1 alineada con la parte superior del cuerpo C2. Asimismo, alinea los orificios A1 y A2 de C1, con los correspondientes de C2.
PLACE C1
SUCH THAT C1 BOT CONTACTS C2TOP
AND B1 A1 IS ALIGNED WITH C2A1
AND B1 A2 IS ALIGNED WITH C2A2
El AUTOPASS realiza todos sus cálculos sobre una base de datos, que define a los objetos como poliedros de un máximo de 20,000 caras. Está escrito en PL/1 y es intérprete y compilable.
LAMA
Procede del laboratorio de Inteligencia Artificial del MIT, para el robot SILVER, orientándose hacia el ajuste de conjuntos mecánicos. Aporta más inteligencia que el AUTOPASS y permite una buena adaptación al entorno. La operatividad del LAMA se basa en tres funciones principales:
EN FUNCIÓN DE LOS OBJETIVOS.
La filosofía de estos lenguajes consiste en definir la situación final del producto a fabricar, a partir de la cual se generan los planes de acción tendentes a conseguirla, obteniéndose, finalmente, el programa de trabajo. Estos lenguajes, de tipo natural, suponiendo una potenciación extraordinaria de la Inteligencia Artificial, para descargar al usuario de las labores de programación. Prevén, incluso, la comunicación hombre-máquina a través de la voz.
Los lenguajes más conocidos de este grupo son:
STRIPS
Fue diseñado, en la Universidad de Stanford, para el robot móvil SHAKEY. Se basa en un modelo del universo ligado a un conjunto de planteamientos aritmético-lógicos que se encargan de obtener las subrutinas que conforman el programa final. Es intérprete y compilable, utilizando, como procesadores, a un PDP-10 y un PDP-15.
HILAIRE
Procedente del laboratorio de Automática Y Análisis de Sistemas (LAAS) de Toulouse, está escrito en lenguaje LISP. Es uno de los lenguajes naturales más interesantes, por sus posibilidades de ampliación e investigación.
Conclusiones
Es mucho lo que se ha hecho en el área de la programación para la robótica; sin embargo aún no existe un lenguaje ideal para la programación de los robots. Son muchos los lenguajes creados hasta ahora, en parte las causas principales de esta amplia gama de lenguajes inadecuados o poco efectivos son:
Hoy en el mundo existe un interés general para lograr un sistema de percepción del entorno cada vez más avanzado. Para esto se hace necesaria la ampliación de la Inteligencia Artificial, que interviene en la valoración del espacio exterior o entorno y determina los planes de acción alternativos o lo que es lo mismo la respuesta a la interacción con ese medio.